On-line Quality Analysis

A system installed on a running production line
Our technology provides a specialised QA system for each client application. Sitting over a conveyor, a unit can perform a wide variety of non-contact measurements and analyses allowing 24/7 production with reduced manual oversight. Live feedback to the control room can be used to optimise the process, provide rapid feedback and consistently assure the quality of produce.
3D Surface
Using eye safe NIR line projectors we are able to scan the top and outside edge surfaces of products moving along a conveyor with millimetre precision. This is performed at over 150 fps to generate rolling depth maps and can handle conveyors up to 2.5m in width as standard.
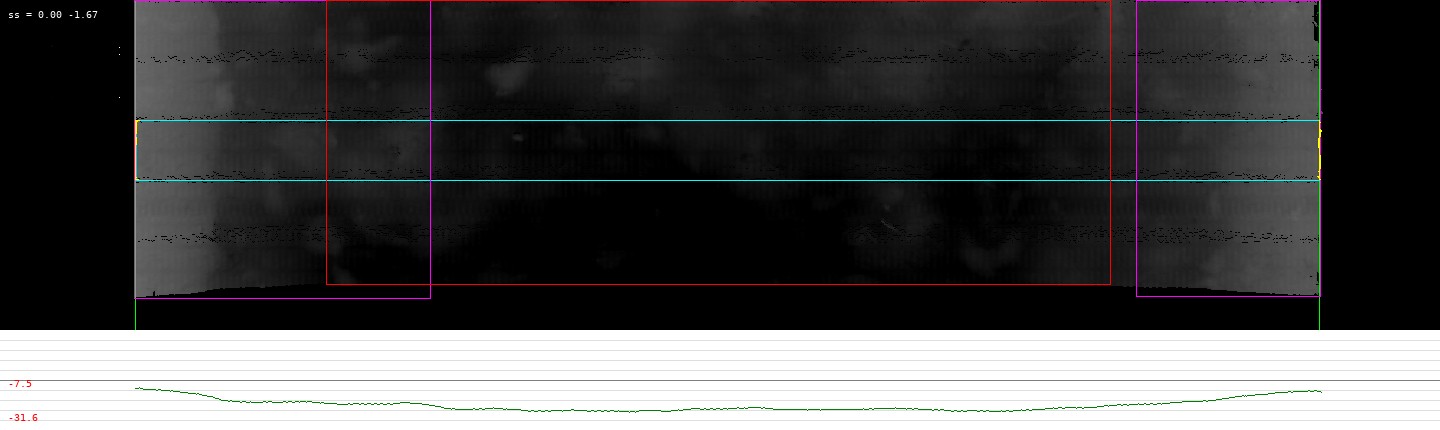
Surface depth map analysis
Visible and Thermal
In the visible spectrum our technology searches the top and outside edge surfaces for defects. We employ traditional image processing techniques to locate regions of interest and then classify them with a convolutional neural network.
During the commissioning phase we gather samples from that production line and train a specialised classifier.
Thermal cameras used in parallel allow us to identify defects which are invisible to the naked eye.
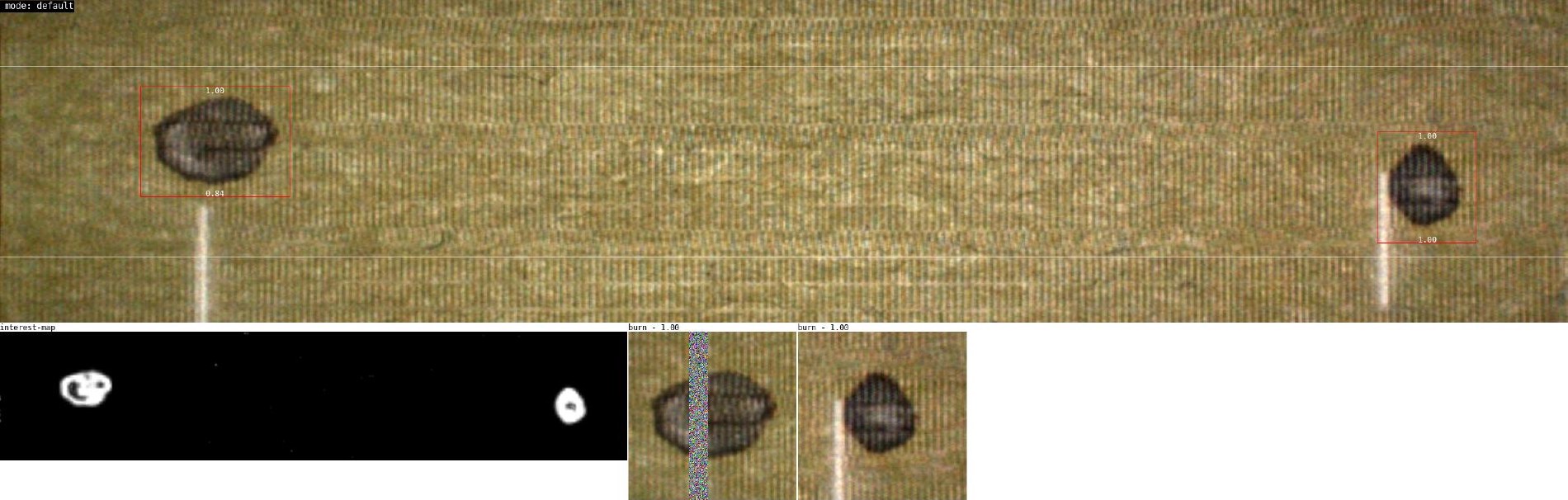
Detection of visible defects
Dimensional
Dimensional measurement can be carried out at high speed without removal of product from the line. Our technology allows precise measurement of the size of objects during transit.
Controlled, powerful NIR illuminators allow images to be captured without motion blur and without causing discomfort to nearby personnel.
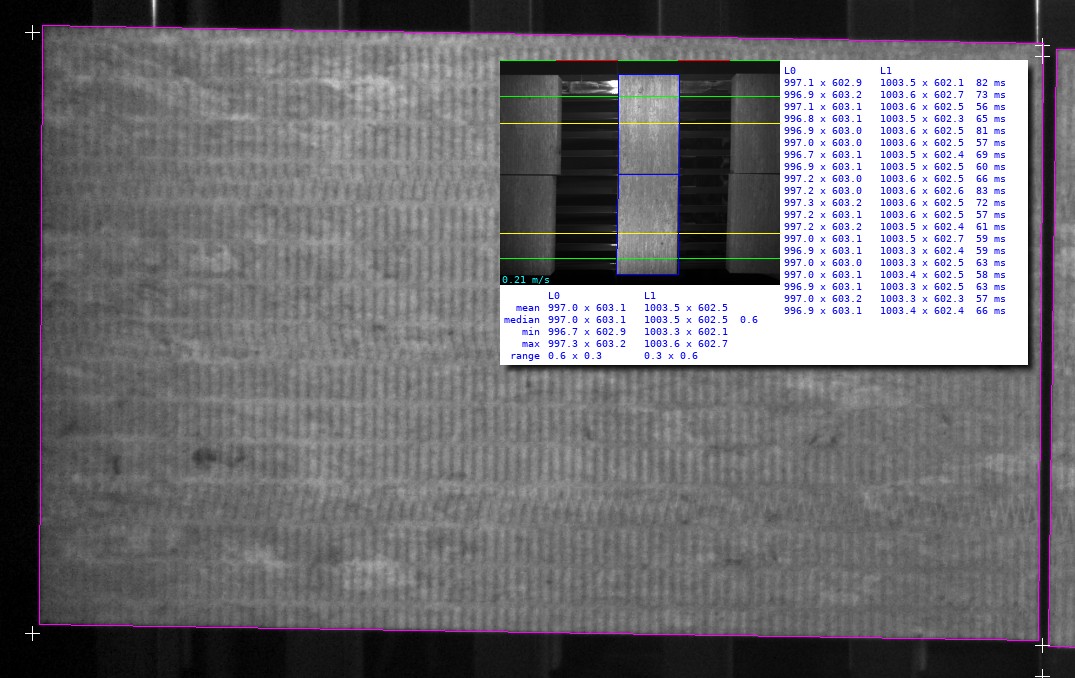
Measuring an object over multiple frames
User Interface
Our products feature clean, modern, multilingual user interfaces engineered to meet customer requirements. They are browser-based to provide convenience of access anywhere on the local network using any computer with a modern browser regardless of operating system.
The following images are examples taken from an interface developed for a multinational client:
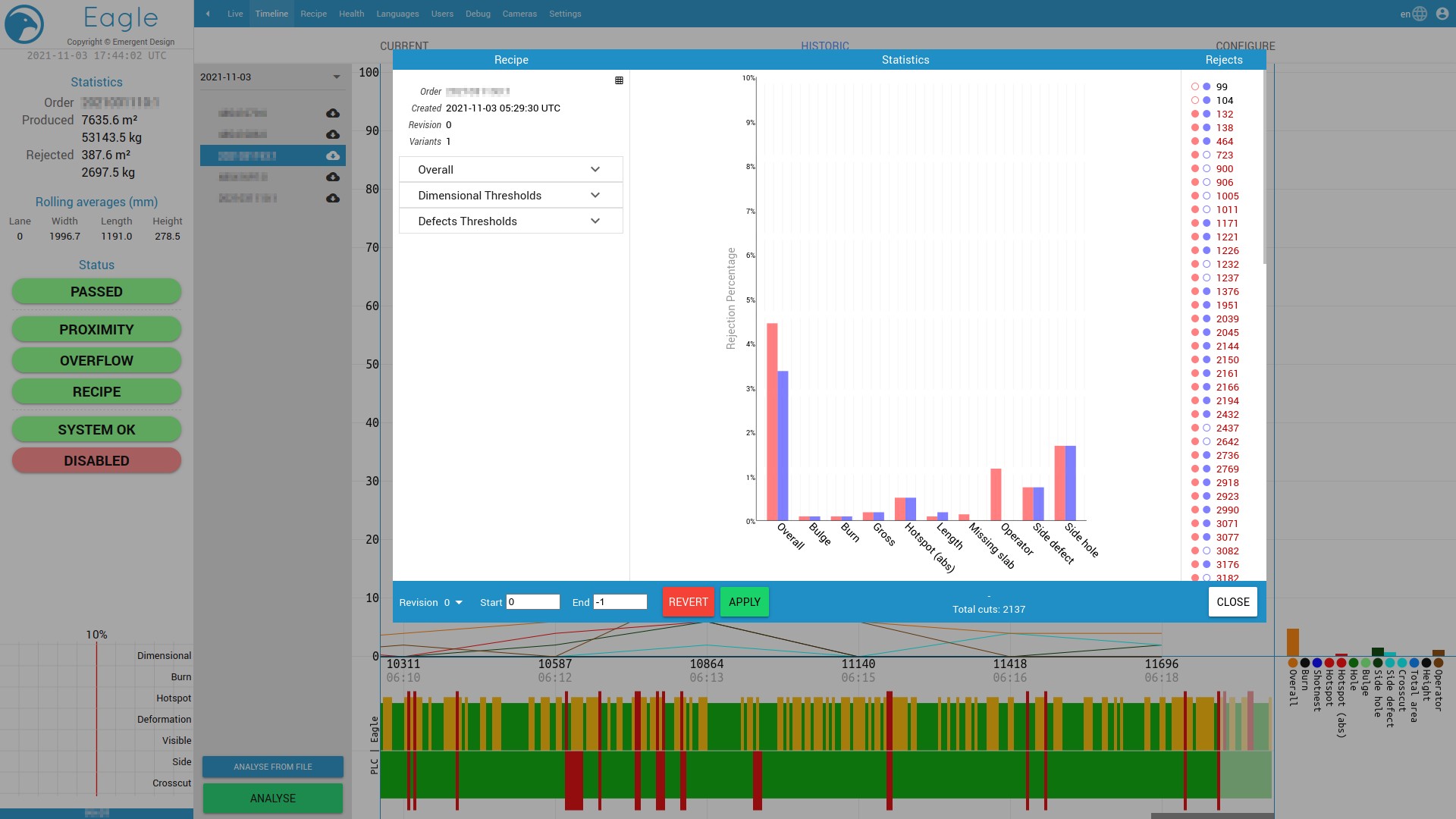
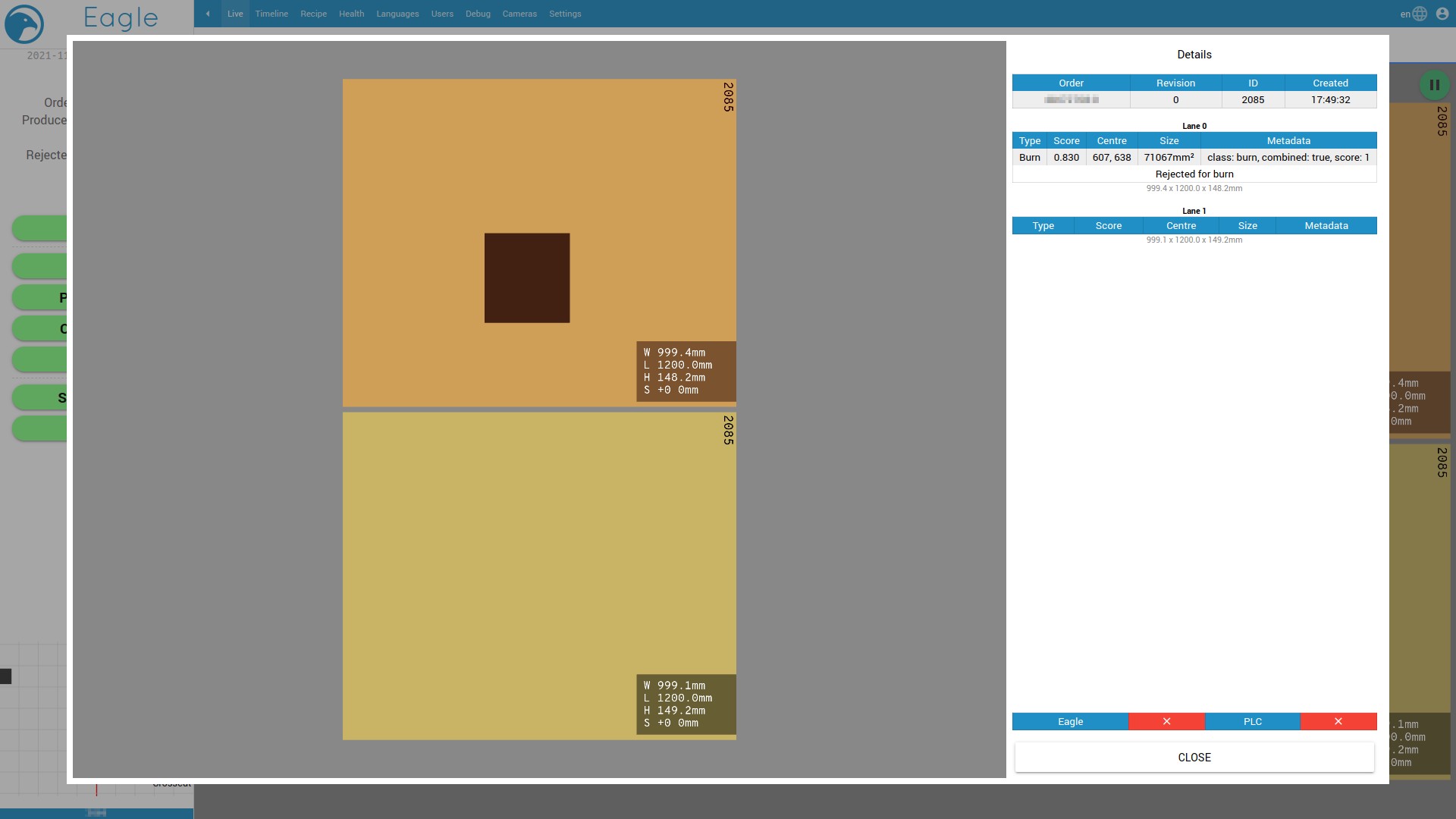
Interface module showing the timeline for a single production order and a dialog that permits post hoc analysis of the results
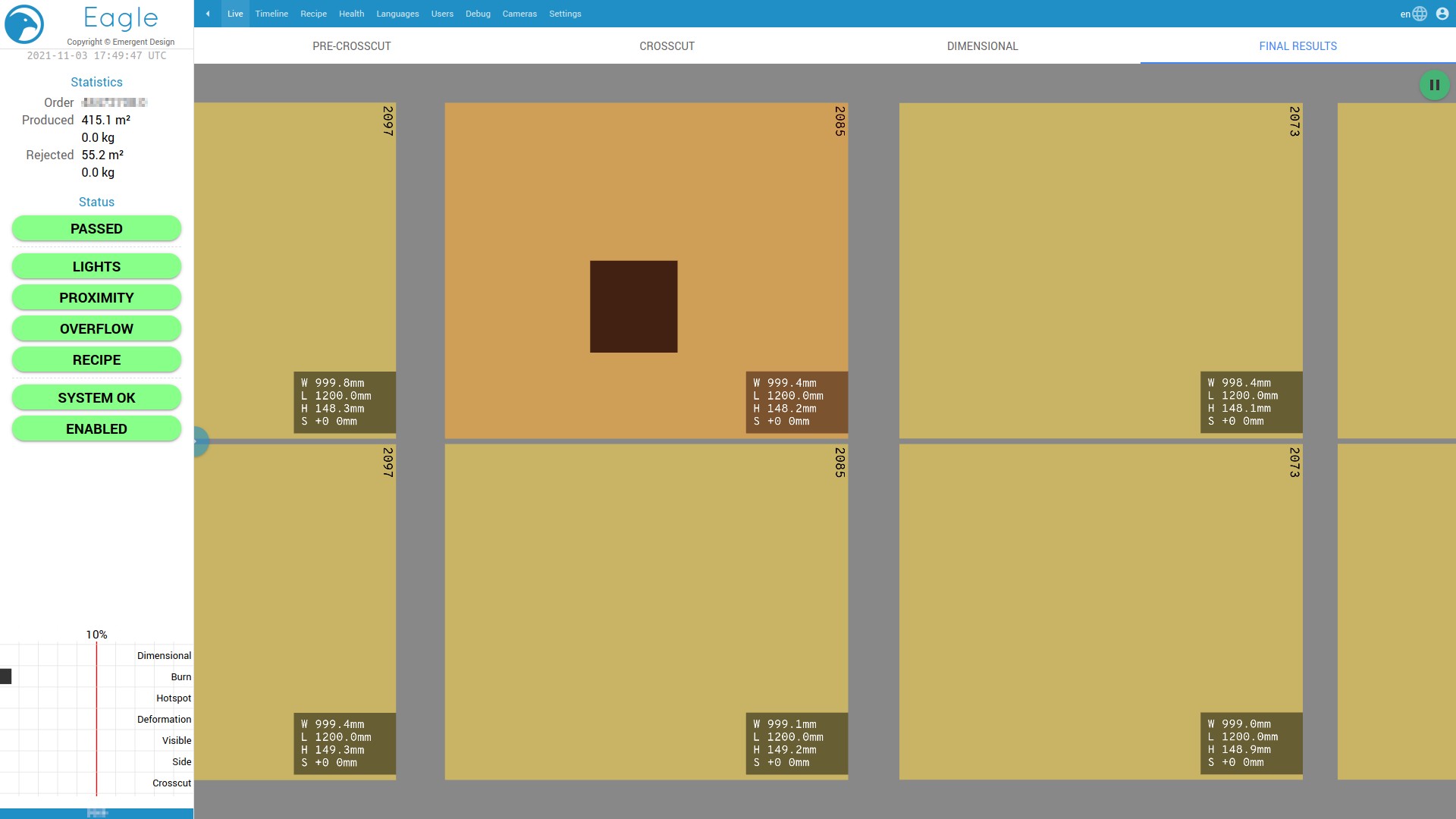
Live graphical representation of production where a defect has been detected